IDEAR: Investigative and Debris Elimination Aquatic Robot
Project Abstract
This project addresses the problem of golf ball accumulation in water hazards and the ocean. This accumulation can release chemicals such as zinc oxide and zinc acrylate as golf balls degrade. Zinc acrylate is, “Very toxic to aquatic organisms, [and] may cause long-term adverse effects in the aquatic environment” (Thermo Fisher Scientific).
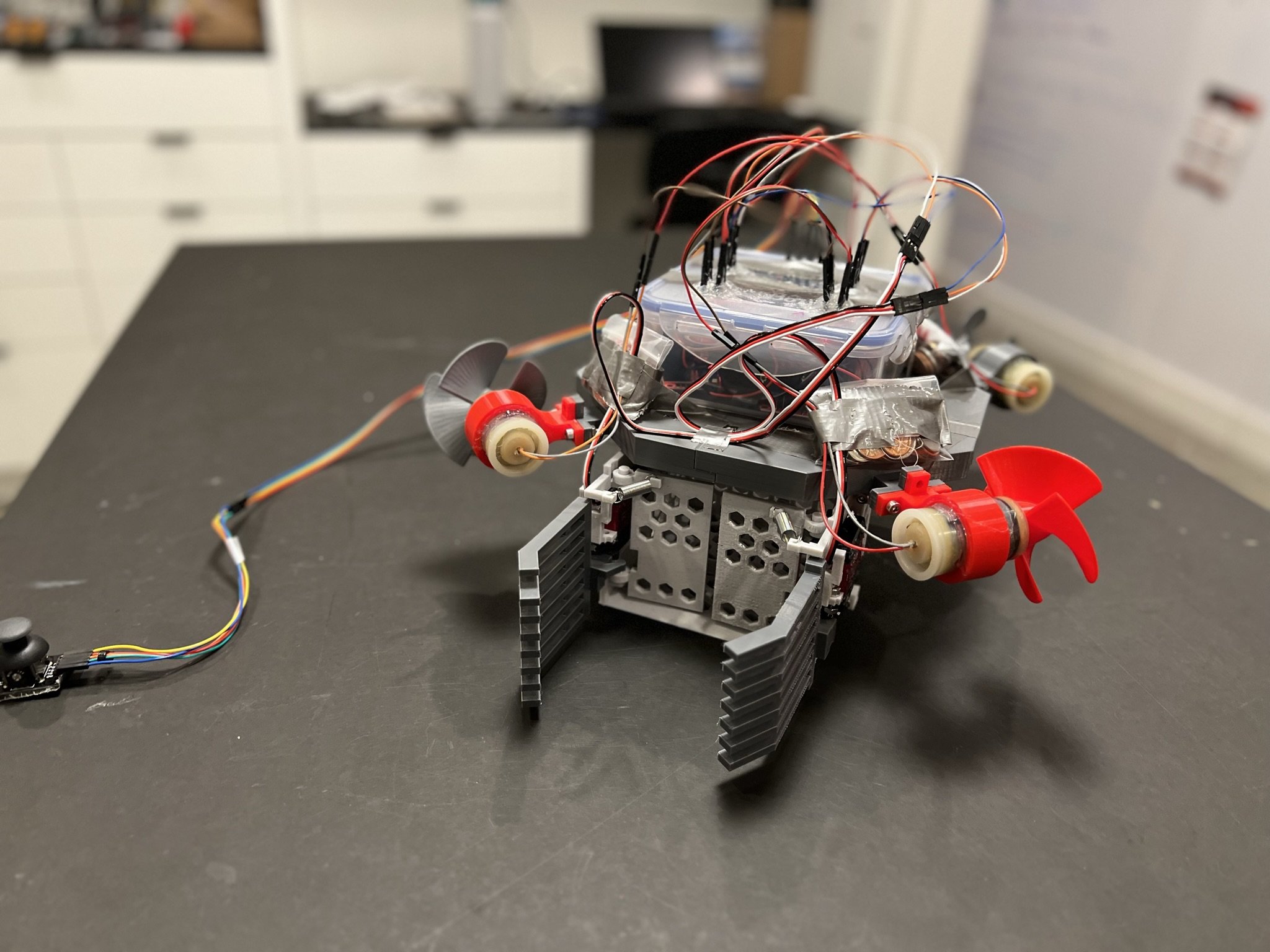
An Investigative and Debris Elimination Aquatic Robot (IDEAR) was developed to remove golf balls. Movement, ball collection, and buoyancy were the primary systems designed. For movement, propellers and pressurized air solutions were considered. A claw, spinning wheels, roller, and suction were considered for ball collection. For buoyancy foam and air were considered. I chose to use propellers for movement, a claw for ball collection, and foam for buoyancy. The first version of the robot had its electronics above the water, a claw with a spring-loaded gate, and eight small propellers. It collected a few balls, but overall, it did not perform well as it had difficulty maneuvering and buoyancy and durability issues. The second version of the robot had its electronics waterproofed, stronger motors, and an improved claw. This robot traveled to, collected, and held multiple balls despite having some issues. Testing of the second robot version proved the viability and feasibility of this early design. Different propeller designs were also tested to increase the robot's energy efficiency.
Future improvements will include reliability, computer vision for autonomous collection, removal of other debris, data collection and reporting. I also plan on leveraging industry experts for feedback and testing opportunities.


















